Search results
-
MB1040 LV-MaxSonar-EZ4
Ranges from 6 inches to 254 inches with a 20Hz read rate. Narrowest detection field. Highest noise tolerance.
Regular price From
$23.65Regular priceUnit price per -
MB7389 HRXL-MaxSonar-WRMT
Discover the MB7389 ultrasonic sensor with IP67 rating for reliable bin level detection. Engineered and assembled in the USA. Shop now at MaxBotix.
Regular price From
$109.95Regular priceUnit price per -
MB1240 XL-MaxSonar-EZ4
Ranges from 20cm to 765cm with a 10Hz read rate. Narrowest detection field. Highest noise tolerance.
Regular price From
$34.95Regular priceUnit price per -
MB7344 HRXL-MaxSonar-WRST4
Ranges from 500mm to 5000mm with a 6Hz read rate. Pulse-width, analog voltage, and TTL serial. Reports range to closest target. Uses filtering to prevent rapid changes in readings. Filter resets at 2% window.
Regular price From
$124.95Regular priceUnit price per -
MB8480 CarSonar-WRT
The MB8480 Car Detection Sensor is a low‑cost vehicle detection sensor that uses ultrasonic technology for non-contact sensing.
Regular price From
$79.95Regular priceUnit price per -
MB1003 HRLV-MaxSonar-EZ0
Ranges from 300mm to 5000mm with a 10Hz read rate. Widest detection field. Excellent for people detection.
Regular price From
$29.95Regular priceUnit price per -
MB1010 LV-MaxSonar-EZ1
The LV-MaxSonar-EZ1 is an ideal entry-level ultrasonic distance sensor for hobby and indoor projects. Low power, high performance. Shop now.
Regular price From
$24.95Regular priceUnit price per -
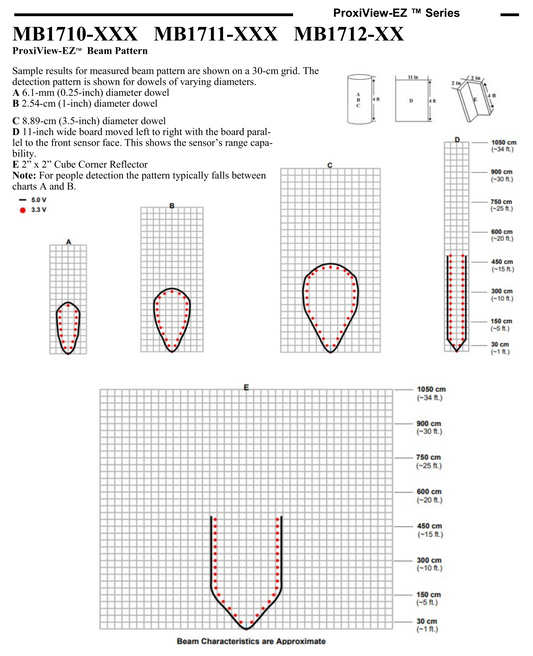
Kiosk Sensor - 5m Range, 1mm Resolution - Combination Ultrasonic and IR Proximity - ProxiView-EZ
The 5m Ultrasonic + IR Kiosk Proximity Sensor is a compact, low-voltage IR + ultrasonic sensor designed for kiosk and people-detection applications. By combining optical proximity sensing with ultrasonic ranging, it offers dependable object detection from the front face out to 5 m, with 1 mm resolution and range measurements from 30 cm to 5 m.
Each sensor auto-calibrates for temperature, supply voltage, and target characteristics, delivering stable readings even in acoustically noisy indoor environments. USB and QWIIC-I2C variants simplify connection to computers and embedded systems while keeping the sensor dimensions under two cubic inches for easy mounting.
Regular price From
$69.95Regular priceUnit price per -
MB1340 XL-MaxSonar-AE4
Ranges from 20cm to 765cm with a 10Hz read rate. Narrowest detection field. Highest noise tolerance.
Regular price From
$34.95Regular priceUnit price per -
MB7380 HRXL-MaxSonar-WRT
The MB7380 HRXL-MaxSonar-WRT is a reliable ultrasonic distance sensor designed to provide accurate measurements over a wide range. Perfect for various automation and robotics applications, this sensor can measure distances from 300mm up to 5000mm with ease.
Equipped with a high read rate of 7.5Hz, the sensor ensures real-time data updates for responsive system performance. Its versatile output options include pulse-width modulation, analog voltage, and TTL serial, making integration straightforward for different control systems.
This ultrasonic distance sensor reports the distance to the nearest target, enabling precise detection and obstacle avoidance. Its robust design and accurate readings make it an excellent choice for projects requiring dependable distance measurement.
Regular price From
$109.95Regular priceUnit price per -
MB1043 HRLV-MaxSonar-EZ4
Ranges from 300mm to 5000mm with a 10Hz read rate. Narrowest detection field. Highest noise tolerance.
Regular price From
$29.95Regular priceUnit price per -
MB1403 HRUSB-MaxSonar-EZ0
Ranges from 300mm to 5000mm with a ~4Hz read rate. Widest detection field. Excellent for people detection.
Regular price From
$49.95Regular priceUnit price per -
MB1444 USB-ProxSonar-EZ4
Ranges from 6 inches to 125 inches. 1-foot detection zone for proximity information with a ~2.5-second acquire time and ~1.5-second release time.
Regular price From
$49.95Regular priceUnit price per -
MB7954 Shielded Cable
High Performance Shielded Cable. Cable sold by the foot as a single continuous section.
Regular price From
$2.99Regular priceUnit price per -
MB1433 HRUSB-MaxSonar-EZ3
Ranges from 300mm to 5000mm with a ~4Hz read rate. Narrow detection field. High noise tolerance.
Regular price From
$49.95Regular priceUnit price per -
MB1202 I2CXL-MaxSonar-EZ0
Ranges from 25cm to 765cm with up to 40Hz read rate. Widest detection field. Excellent for people detection.
Regular price From
$34.95Regular priceUnit price per -
MB7854 TankSensor
NEW! This ultrasonic tank level sensor features a 1mm resolution with a minimum range of 300mm and a 16.5-meter maximum range and operates from 5.5V to 40V. The sensor has the following outputs: RS232 & TTL Serial, analog voltage, analog envelope.
Regular price From
$124.95Regular priceUnit price per -
MB7974 Snap-On Horn
Improves snow depth measurements and detection range for people with select sensors. Select this option on the applicable product page to purchase.
Regular price From
$40.00Regular priceUnit price per -
MB1330 XL-MaxSonar-AE3
Ranges from 20cm to 765cm with a 10Hz read rate. Narrow detection field. High noise tolerance.
Regular price From
$34.95Regular priceUnit price per -
MB1260 XL-MaxSonar-EZL0
Ranges from 25cm to 1068cm with a 10Hz read rate. Widest detection field. Excellent for people detection.
Regular price From
$34.95Regular priceUnit price per -
MB2532 IRXL-MaxSonar-CSA3
Ranges from 50 cm to 1650 cm with a 1.8Hz read rate. Excellent for cargo detection.
Regular price From
$49.95Regular priceUnit price per -
MB1300 XL-MaxSonar-AE0
Ranges from 25cm to 765cm with a 10Hz read rate. Widest detection field. Excellent for people detection.
Regular price From
$34.95Regular priceUnit price per